PID Class Reference
Detailed Description
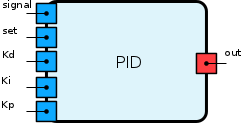
schema
This circuit will compare the input signal with a reference signal and regulate the output in order to minimise the difference using a PID controller.
Initialisation parameters:
- pushed = True|False push the output buffer immediately if True
Input channels:
- signal = incoming signal
- set = reference signal
- Kp = proportional constant
- Ki = integral constant
- Kd = derivative constant
Output channels:
- out =

Examples:
Inherits Circuit.
Additional Inherited Members | |
 Public Attributes inherited from Circuit Public Attributes inherited from Circuit | |
| name | |
| Name of the circuit. More... | |
| enabled | |
| if it is working... More... | |
| machine | |
| Reference to the virtual machine to which this circuit belongs. More... | |
| pushed | |
| Push output buffer at the end of Update. More... | |
| I | |
| Dictionary of input channels. | |
| O | |
| Dictionary of output channels. | |
| cCoreID | |
| index of circuit in cCore | |
Documentation for pyVAFM
Generated on Wed Feb 8 2017 10:13:49 for pyVAFM by  1.8.9.1
1.8.9.1
1.8.9.1